

Vacuum Grippers and Lightweight Palletizers
Why these effectors are most effective for lighter-task, carton palletizing applications
One of the most exciting things about today’s automation is that it’s becoming increasingly specialized; like eating from a buffet, you can choose what you want. That’s the idea behind cobot palletizers that zero in on a specific target: lighter weight, end-of-line carton palletizing that used to take high six figures and months of implementation time. The critical part of any palletizing project, of course, is the end effector.
Robotics has always been as much about the effector as the robot, and the choices are many: vacuum grips, finger assemblies, magnets and more. For this particular item on the buffet—lighter, robotic carton palletizing—vacuum grippers are the best choice.
What should a carton end effector do?
- The gripper handle the cartons with care. Unlike heavy industrial-weight palletizers, these systems handle finished cartons, often prior to shipment. Making sure they aren’t damaged is particularly important for lighter-weight applications that might ship directly to retail or customers.
- The gripper must grip the entire carton top surface. In this case, the top of a carton, so that the entirety of the load is gently supported, and pressure is distributed to ensure smooth loading and prevent twisting, deforming and crumpling. This also keeps cartons oriented correctly.
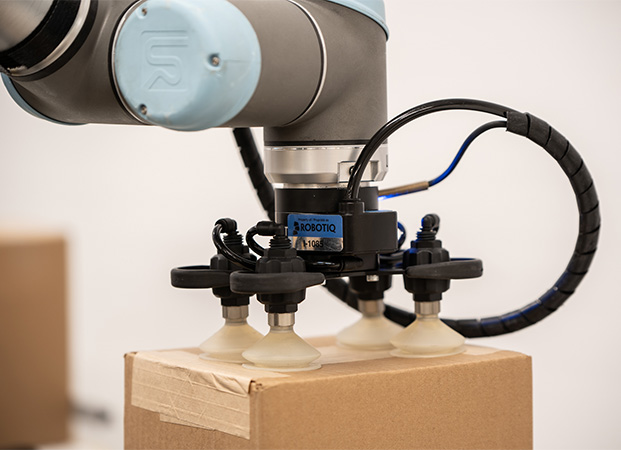
- The gripper must lift cartons from above. This is called “parallel” load handling, where the effector has access to only one side—the top of a smooth carton—of the load. The gripper is parallel to both the top of your boxes, the floor, a pallet and a conveyor line if applicable.
- The gripper must be capable of adapting to various carton loads. For instance, if one shift picks a particular kind of order that has different packaging, can you quickly swap between programs and allow the same gripper to handle more than one carton size or weight?
- The gripper must foster high throughputs. One of the core advantages of any automation, and that certainly includes palletizing, is continuous work. Palletizers function every day, all day as fed by your system, taking inputs and palletizing them as it goes.
Comparisons: vacuum grippers vs. other types
Type |
Responsiveness & Throughput |
Applications |
Load |
|---|---|---|---|
Vacuum Grippers |
Fast; excellent throughput | Ideal for lightweight palletizing; requires a single surface, such as the top of a carton | Dual parallel object(s) with flat surface |
Fingered Grippers |
Slow; slower throughput | Versatile, but can handle only one object without a dual-grip effector. Good for industrial, heavy palletizing | Single parallel object |
Clawed Grippers |
Fast; quick throughput | Heavy, deformable loads (bags). Not suitable for lighter objects | Single deformable bag with porous surface |
Magnetic Grippers |
Fast; excellent throughput | Ideal for lightweight palletizing; requires a single surface (ferromagnetic materials only); can grip some loads that vacuum grippers cannot handle | Dual parallel object(s) with flat surface |
Customized Effectors |
Varied, based on design and application | Can be built to suit basically any application, but are expensive and have very long lead times along with limited versatility | Handles most any load type based on the design |
The ideal way to palletize lighter weight loads
These robotic palletizers are ideal because they fit into the zone between fully manual processes and heavyweight automation. The systems are ideal for throughputs up to 13 cartons per minute, loads up to 28 pounds, and pallet stack heights up to 108″ tall. This isn’t a terribly narrow a range of applications, and can fit many ecommerce, retail and other operations without modification.
More resources
- Full robotic vs. Cobot vs. Manual Palletzing
- The Ergonomics of Automation
- The New Rules for Industrial Automation ROI
Tags: palletizing, ergonomics
Scott Stone is Cisco-Eagle's Vice President of Marketing with 35 years of experience in material handling, warehousing and industrial operations. His work is published in multiple industry journals an websites on a variety of warehousing topics. He writes about automation, warehousing, safety, manufacturing and other areas of concern for industrial operations and those who operate them.